案例研究
行业:仓库/物流
产品:Helios 3D飞行时间相机
SDK: Florinco公司的视觉软件
自动叉车堆叠奶酪盒
使用3D 飞行时间技术
长时间陈化奶酪并不像看起来那么容易。大量的奶酪需要储存在合适的温度和湿度的地方,以使它们具有最佳的催熟条件。有些奶酪需要一个月,有些则需要几年。
在荷兰的一家奶酪工厂,12辆自动驾驶的叉车以完全自动化的过程将奶酪盒进行堆垛和拆垛。丰田物料搬运公司(Toyota Material Handling)提供的自动叉车在生产和催熟大厅之间全日无休地移动奶酪架。这些架子大约3米高,可以堆叠到3层。在把一个架子放在另一个架子上之前,需要确定它的确切位置。

挑战
对于具有光滑表面和金属边缘的堆垛,自动化精确定位是3D相机技术面临的一些挑战。最初叉车使用的是不同的3D飞行时间相机,在最开始的实施中,由于金属架的反射表面,无法适当的工作。随着时间的推移,架子上的油漆会磨损,新型号的架子虽没有油漆,但也是镀锌的。然而,这两种都因为金属表面光泽导致测量质量不足,阻碍了叉车精确的定位和堆放箱子。
事实上,ToF相机也必须从一个较高的角度测量,这使得高反射表面成为一个更大的挑战,因为相机没有可选择的位置,以提供一个更好的视角。需要对ToF相机生成的三维点云进行分析、滤波和增强,以生成可靠的深度图像。由于价格和更大的尺寸,使用投射光的立体视觉相机不是一个明智的选择。

挑战:由于支架表面的高反射,ToF相机必须从一个较高的角度进行测量。
解决方案
在评估了所有可用的解决方案后,LUCID的Helios飞行时间相机达到了理想价格范围内的最佳结果。虽然高反射面仍然影响测量质量,但相机产生的点云足以测量相对架子的位置。这一次,每个叉车使用两个Helios 3D ToF相机,测量卡车所装载的架子和将要放置的架子的相对位置。根据相对位置,叉车小心地堆叠货架。
智能软件解决方案开发商Florinco开发了视觉算法,从图像中提取某些特征,从而得出更可靠的测量结果。Helios ToF相机与一台运行Linux的Intel Atom处理器的工业PC相连。该PC机连接到叉车的内部网络,将测量结果与叉车的中央处理器进行通信。自该系统实施以来,第一代Helios相机没有提供IP67防护,ToF相机被放置在一个autoVimation公司 的Orca型号外壳内。与此同时,LUCID推出了下一代Helios2 ToF相机,具有可靠的IP67级镜头保护外壳和特殊的3D亚毫米精度的深度数据。

LUCID的第一代Helios ToF相机连接到叉车的内部网络,提供理想价格范围内的最佳3D成像结果。
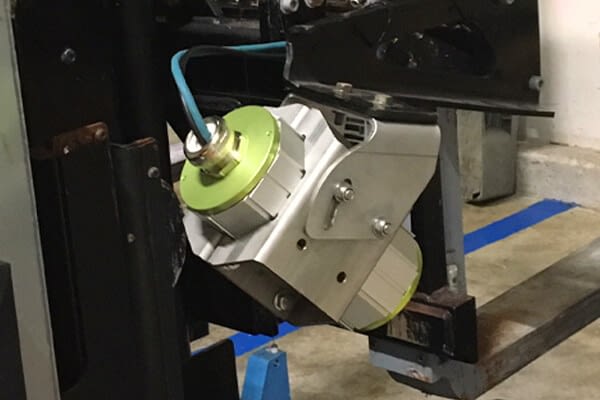
第一代Helios ToF相机被放置在一个autoVimation Orca外壳内,用于IP67防护。
总结
Helios系列的3D飞行时间相机是许多自动仓库的有效解决方案。通过使用Helios相机,Florinco能够克服金属架的镜面反射,创造出无需手动控制的自动叉车。在引入新解决方案之前,10%的堆叠必须手工完成。有了新的解决方案,99.9%的堆叠都能正确运行,并且完全自动化。