
索尼 DepthSense 3D 传感器技术解析:提升飞行时间(ToF)性能
技术协同
飞行时间(ToF)技术已在工业领域应用多年。然而,随着索尼 IMX556 DepthSense ToF 传感器的发布,3D 感测的准确度与重复精度达到了全新高度。凭借独特的 DepthSense 像素结构,索尼的 ToF 传感器能够以更高的可靠性实时重建三维物体,呈现更丰富的细节并实现更高的帧率。结合 LUCID 自主研发的相机技术,索尼 DepthSense 传感器能够充分发挥其在工业场景中的性能优势。
索尼 DepthSense IMX556 飞行时间技术如何工作?
飞行时间技术通过测量光从光源发出、经场景反射后返回传感器所经历的时间延迟来计算距离。索尼 IMX556 CMOS 传感器采用连续波(CW)调制方式,也称为连续波相位移或间接式飞行时间(iToF)。与测量单次光脉冲延迟不同,Helios 相机会发射连续调制光,通过比较发射光与反射光之间的相位差来计算距离。为了精确计算相位差,IMX556 采用电流辅助光子解调器(CAPD)像素结构,使入射光信号与发射光调制保持同步采样。CAPD 在每个像素的光电二极管内部施加交替电压,形成漂移电场,将电子分流至交替的检测结点。在下方的简化示意图中,调制光由 VCSEL(垂直腔面发射激光器)二极管发射。光经反射后进入像素光电二极管并转换为电子,然后在交替的检测结点之间分配,从而提高光收集效率。
上图:CAPD 的交替电压产生交替漂移电场,将电子分配至两个检测结点(b1、b2)。该交替漂移电场与 VCSEL 激光二极管的调制频率保持同步。两个检测结点之间具有 180° 相位差,以完整采集反射光信号。通过这种方式,传感器能够比较发射光与反射光,并计算两者之间的相位差。
补充说明
索尼 IMX556 DepthSense ToF 传感器规格:
- 背照式 CMOS
- 640 x 480 px
- 全局快门
- 10.0µm 像素尺寸
- 1/2″ 传感器尺寸
补充说明
CAPD ToF 图像传感器技术最早由比利时公司 Softkinetic 的创始团队于 2006 年提出,该公司于 2015 年被索尼收购。下图:CAPD 示意图摘自论文《Time-of-flight Optical Ranging Sensor Based on a Current Assisted Photonic Demodulator》,作者 D. Van Nieuwenhove、W. Van der Tempel、R. Grootjans 和 M. Kuijk。
分而治之
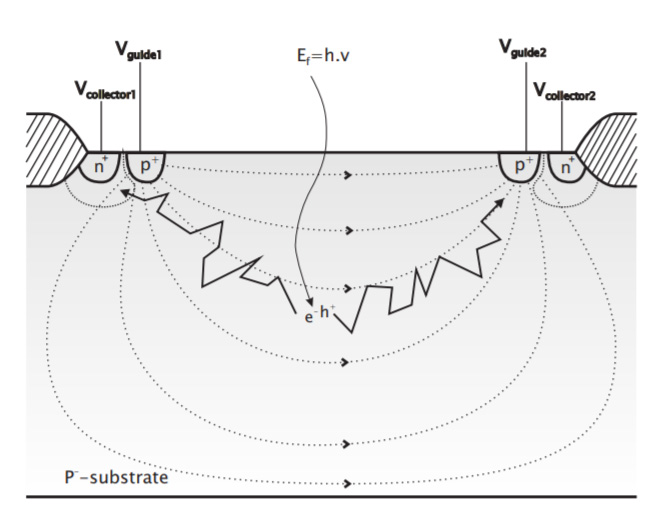
当光子在光电二极管内转换为电子后,必须迅速被拉向检测结点,才能使相机准确计算相位差。每个检测结点内部包含正极区(p+)和负极区(n+)。当引入电流形成漂移电场时,空穴(h+)会向最低电压的 p+ 区域移动,而电子(e-)则向相反方向移动至最高电压的 n+ 区域。
CAPD 具有极高的速度和效率,能够快速切换漂移电场极性,从而产生极高的解调对比度。高对比度意味着更多电子会根据其返回时间被引导至正确的检测结点,从而实现更高质量的相位差计算,提升 DepthSense 传感器的测量准确度与重复精度。
此外,CAPD 的漂移电场能够深入光电二极管内部,加速尽可能多的电子向检测结点移动。结合索尼的背照式技术,可在 850 nm 波长下实现高达 57% 的量子效率。因此,Helios 相机在 1 米测量距离下可实现小于 5 mm 的准确度以及小于 2 mm 的重复精度。
左图:CAPD 横截面示意图,电子(e-)加速向最高电压区域(n+)移动,而空穴(h+)则向最低电压区域(p+)移动。右图:CAPD 有助于实现高量子效率(850 nm 时为 57%)以及高解调对比度。
单帧四相位
CAPD 的高速特性使 IMX556 能够在每一帧深度图像中以 4 个不同相位对入射光进行采样。每次采样也称为一个微帧(micro-frame),相位依次递进 90°(0°、90°、180°、270°),每个微帧包含三个阶段:复位、积分和读出。复位阶段将像素电压重置至基准值。积分阶段通过电流产生漂移电场,将电子引导至检测结点。读出阶段读取传感器上的所有像素数据。读出完成后,传感器进入空闲阶段,以降低功耗并减少热量产生。

在深度计算中,仅使用 0° 和 90° 两个微帧即可完成距离求解。当目标物体距离发生变化时,0° 和 90° 微帧中的 b1 与 b2 数值也会随之变化。通过 b1 减去 b2,还可以有效消除环境光影响。
然而,即使 b1 与 b2 接收到的光子数量相同,在光子到电子转换以及电子到电压转换过程中仍会产生微小波动。因此,必须消除这些波动对 b1 与 b2 数值的影响。
为此,系统引入另外两个与 0° 和 90° 相位相差 180° 的微帧(此时 b1 与 b2 的角色互换)。通过将 0° 微帧的 b1 与 180° 微帧的 b2 相加(反之亦然),可以得到两个新的数值,这些数值消除了在转换过程中产生的灵敏度差异,例如暗电平偏置、增益误差等,从而在每个像素层面抵消这些误差。
b1 减去 b2 可在每个微帧中有效消除环境光影响。
将 0° 微帧的 b1 与 180° 微帧的 b2 相加(反之亦然),可得到两个消除了 b1 与 b2 灵敏度差异的新数值(这些差异源于暗电平、增益等转换阶段误差)。
CAPD + 背照式 CMOS
CAPD 提供了一种在光电二极管内部高效解调与收集电子的方式,但在此之前,反射光必须能够无阻碍地到达传感器的光电二极管。索尼的背照式(BSI)技术确保最大程度的入射光能够进入光电二极管。与传统前照式 CMOS 结构不同,背照式传感器将金属布线层置于光电二极管下方,从而提升感光效率。这种结构避免了布线和电路对入射光的遮挡,使更多光子能够被有效利用。
IMX556 的另一项优势在于减少不必要的图像伪影。由于 IMX556 采用 CMOS 架构,相比 CCD ToF 传感器,在抑制拖影(smearing)和溢光(blooming)方面表现更佳。拖影和溢光会导致错误的三维数据,其产生原因是像素井电荷溢出并扩散至相邻像素,通常由强光源或高反射表面引起。在许多 ToF 应用场景中,尽量减少这些影响至关重要。Helios 相机所采用的 IMX556 CMOS 传感器在降低此类图像伪影方面具有更高的容错能力。
上图:CCD 产生的溢光与拖影伪影
上图:CMOS 图像无拖影且溢光现象更少
VCSEL:高性能光源
用于距离计算的发射光对 ToF 相机性能至关重要。为确保稳定可靠的表现,Helios 相机采用 4 颗垂直腔面发射激光器(VCSEL)来发射调制光。这些 VCSEL 发射经过优化的窄带光束,中心波长为 850 nm,具有高峰值功率以及快速上升与下降时间。除了产生高调制对比度外,850 nm 的窄发射波段不会产生可见光谱(380–740 nm)光线,从而避免对系统中的其他 2D 相机造成干扰。与边缘发射型激光器相比,VCSEL 具有更低的相干性,可有效减少散斑现象。更高的峰值功率能够向场景投射更多光子,降低噪声,并增强对环境光的抗干扰能力,从而提升距离计算的准确度与重复精度。

上图:Helios 所采用的 VCSEL 在 850 nm 窄波段发射足够强度的光,以充分发挥 IMX556 CMOS 传感器在 850 nm 波长下 56.6% 的量子效率。
补充说明
Helios ToF 相机在机身前端安装 4 颗 VCSEL。VCSEL 为成像板四角附近的小型白色方块器件。

上图:与 LED 相比,VCSEL 具有更快的上升与下降时间,使其成为 IMX556 等连续波相位移 ToF 传感器的理想光源。VCSEL 还能实现更高的调制频率,从而在较短测距范围内获得更高的准确度与重复精度。
结论
索尼 IMX556 DepthSense ToF 传感器能够实现可靠、准确且高重复精度的三维测量。创新性的 CAPD 漂移电场技术结合索尼在背照式 CMOS 领域的深厚技术积累,使 DepthSense 传感器成为工业相机集成的理想选择。此外,搭载 IMX556 传感器的 LUCID Helios 相机,通过 4 颗 VCSEL 发射器提供高对比度场景照明,形成坚固耐用的工业级方案。该方案可在相机与目标距离 0.3 m 至 1.5 m 的范围内实现小于 5 mm 的准确度,并在 1 m 距离下实现小于 2 mm 的重复精度。
Helios2、Helios2+、Helios2 Wide、Helios2 Ray ToF 相机,搭载索尼 DepthSense 传感器

Helios2 飞行时间 3D 相机型号
Helios2 系列为高精度 3D ToF 相机,配备四颗 850 nm 或 940 nm VCSEL 激光二极管,并集成索尼新一代 DepthSense™ IMX556PLR 背照式 ToF 图像传感器。相机提供 640 x 480 深度分辨率,工作距离最远可达 8.3 米。机内处理可输出距离(Range)、强度(Intensity)与置信度(Confidence)数据,降低对高成本主机计算系统的依赖。IP67 防护等级、抗冲击与抗振动认证、工业级 EMC 抗干扰能力以及 M12 以太网接口,使该相机非常适用于工厂与仓储环境。 访问 Helios2 产品页面