



可执行的视觉智能
食品自动化中的机器视觉系统,其核心要求是在复杂环境中提取可靠信息。
这些系统采集到的图像数据随后需要进入更大的自动化系统,用于检测、分类、引导并执行动作。从土壤、加工、包装到仓储,各类应用表面上差异很大,但其底层成像问题往往比最初看起来更相似。解决这些问题不仅取决于图像质量,也取决于一些在初期评估时容易被忽视、但在后续系统集成和稳定运行中至关重要的相机功能。
不同应用,相似挑战
食品自动化涵盖了多种环境和任务。系统可能需要在尘土飞扬的农田中检测石块,在处理过程中对鱼类进行分类,为机器人清洁定位不规则的有机表面,在强反光条件下检测包装产品,或引导自动叉车在具有反光表面的仓储设施中运行。乍看之下,这些应用似乎并不相关。但当我们拆解其核心视觉需求时,会发现相同的基础成像挑战会反复出现。

生物与环境变异性
自然环境并不统一。食品、天然有机表面、户外环境和运动目标在尺寸、形状、湿度、位置和外观方面都可能存在较大差异。
实时决策
在许多系统中,仅仅完成检测还不够。图像数据必须足够快速地完成处理,才能在工艺流程的时间约束内触发执行动作。
光学不确定性
有时,检测所需的信号在可见光下很弱、被隐藏,甚至不可见。眩光、透明材料、潮湿表面和表层以下缺陷,都可能使标准 RGB 成像难以满足检测需求。

这三类挑战并不会与某一个具体应用一一对应。单个应用可能同时涉及多个挑战。这也正是为什么相同的相机技术会出现在差异很大的系统中。当底层成像挑战相似时,坚固型 2D 相机、紧凑型嵌入式相机、3D 飞行时间相机、SWIR 相机或偏振相机都可能在多种不同的应用场景中发挥关键作用。
超越传感器:
食品自动化中的关键相机功能
图像质量和传感器性能固然重要,但在为食品自动化选择相机时,它们并不是唯一的考虑因素。实际系统还可能依赖环境防护、紧凑尺寸、同步、带宽、触发,以及第三方软件或硬件兼容性。在某些应用中,坚固的 M12 螺纹锁紧电缆连接器或分体式成像头等容易被忽视的特性,可能比单纯的像素数和帧率更加关键。
面向工业设备稳定运行的坚固设计
- 冲击与振动认证
- 可靠的安装孔设计
- EN 60068-2-27, EN 60068-2-64, EN 60068-2-6
适用于严苛环境的环境防护
- IP67 防尘防水
- 宽工作温度范围
- 密封连接器
- 工业级 EMC 抗扰度
适用于狭小机械空间和嵌入式系统的紧凑外形
- 24×24 mm 尺寸,约 30 g
- 90° 与 180° 外形结构
- 分体式成像头与多种接口方向选项
用于协调机器人、传送带和其他设备的时序与同步
- 计数器和定时器
- Chunk 数据、事件数据
- 时间戳
用于确定性图像采集和设备控制的 I/O 与触发
- GPIO
- 光隔离与非隔离 I/O
- PTP (IEEE 1588)
- 硬件与软件触发
用于可靠数据流传输的接口与带宽
- 基于以太网的相机
- 1GigE, 2.5GigE, 5GigE
- 支持 RDMA 的 10GigE、25GigE
系统集成与兼容性
- Arena SDK、API、代码示例
- 第三方软件兼容性
- GigE Vision、行业标准
在这一更全面的相机选型视角下,以下章节将介绍这些反复出现的成像与集成挑战如何贯穿食品自动化的各个阶段。我们将从土壤环节开始。在这一阶段,户外环境变化、运动和严苛工况使可靠检测变得尤为困难。
从农田到叉车:土壤、加工、包装、仓储
土壤:
在严苛且不可控的环境中检测目标
在土壤环节,机器视觉系统往往需要在整个流程中最不可控的条件下工作。粉尘、振动、不断变化的光照、移动的机械设备、碎屑以及不规则地形,都会增加获取可用图像数据的难度。挑战并不只是“看见”一个目标,而是在环境持续变化的同时可靠地检测目标。
户外农业和田间系统很少能在稳定光照下运行,也很少具备固定的目标呈现方式。目标可能部分被遮挡、形状不规则,或被其他容易造成视觉混淆的元素包围。同时,搭载相机的设备通常处于运动状态,因此成像、处理和执行动作必须协同完成。
关键洞察: 在严苛的户外环境中,相机的坚固性、运动稳定性和实时响应能力与图像质量同样重要。
主要挑战
生物与环境变异性
实时决策
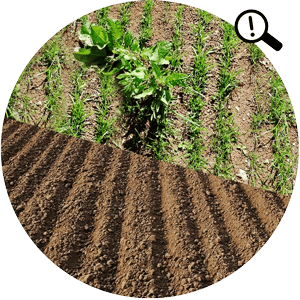
石块拣选
石块拣选系统需要在粉尘、振动和不可控光照环境下,在运动过程中检测异物。这很好地说明了,当运动清晰度和可靠触发比实验室中的理想条件更重要时,坚固型 2D 成像如何解决真实场景中的复杂问题。

系统使用的相机:Triton IP67 相机。
配备全局快门的坚固型工业 2D 相机能够清晰捕捉高速运动场景,同时 IP67 防护以及通过冲击和振动认证的硬件,可支持其在崎岖地形中的户外部署。
农作物喷洒
精准农作物喷洒系统必须在紧凑受限的机械空间内区分作物与杂草,并实时触发局部喷洒决策。在这类应用中,最大的难点不仅在于图像分析,也在于如何将视觉系统嵌入现有农业机械中。


系统使用的相机:Phoenix 模块化相机。
非常小巧、轻量化的相机平台往往比传感器尺寸本身更重要。外形结构、安装方向选项以及灵活集成能力,都会直接影响系统能否真正部署。
加工:
将生物复杂性转化为可执行数据
食品加工自动化需要多个设备之间实现同步,并以确定性的方式执行动作。虽然这一阶段的环境与土壤环节不同,但许多相同挑战会以另一种形式继续存在,包括湿气、污垢、蒸汽、冲洗环境以及其他环境变化来源。应用必须处理表面变化明显的有机目标,并满足严格的公差要求,同时还需要在 2D 或 3D 空间中精准地完成分类、定位、测量、检测或动作引导。这也是食品自动化变得尤为复杂的阶段。
在这一阶段,不同传感方式的价值也开始更加明显地体现出来。有些任务依赖紧凑型 2D 分类,另一些任务则需要 3D 点云,或超越可见光范围的成像能力。
关键洞察: 在食品加工中,可靠的自动化取决于为具体任务匹配合适的传感方式,无论是 2D 分类、3D 引导,还是超越可见光的成像。
主要挑战
生物与环境变异性
实时决策
光学不确定性
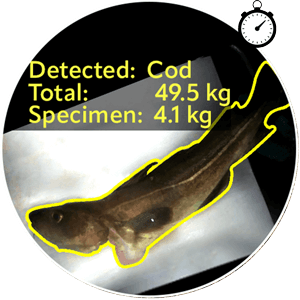
渔获登记
在鱼类被连续收集和处理的过程中,视觉系统必须在运动和光照变化下完成物种分类、尺寸或生物量估算,并跟踪目标。这很好地说明了生物变异性和实时决策如何在同一个系统中同时出现。
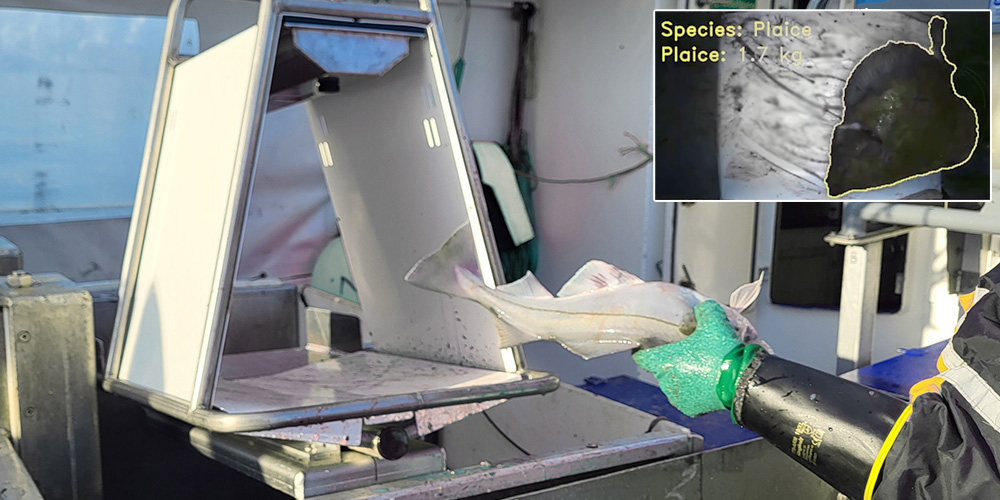
系统使用的相机:Phoenix 模块化相机。
紧凑型相机可直接集成在系统外壳内的采集位置,在该位置空间可能非常有限,处理条件也可能难以预测。
奶牛清洁
在许多食品自动化应用中,机器人需要与活体动物或其他非刚性生物表面进行交互。在这些情况下,3D 几何信息变得至关重要。挑战不仅是看见目标,而是在潮湿、反光和运动条件下提取稳定的点云数据。


系统使用的相机:Helios2+ 3D ToF IP67 相机。
LUCID 的 3D 飞行时间相机能够提供机器人引导所需的深度数据,同时 HDR 和工业级 IP67 防护有助于在复杂工况下保持可靠性。
食品安全
在食品安全检测中,污染物可能出现在不规则的胴体表面,并处于潮湿和反光条件下,检测时间通常也非常有限。挑战不仅是检测污染物,还需要将其足够精确地映射出来,以便后续移除或处理。


推荐相机:Helios2 Chroma RGB-D IP67 相机。
RGB-D 相机系统将彩色信息与深度信息结合在一起,有助于把基于外观的检测与空间动作关联起来。相比从零开始搭建独立的 2D 和 3D 系统,这种方式可以降低集成复杂度。
材料洞察
有些加工环节的挑战并不涉及几何信息。碰伤、水分变化和细微的材料差异可能真实存在,但在标准可见光成像中难以甚至无法区分。当可见光不足以提供所需对比度时,工程师需要利用其他波长或光学特性来获得检测所需的信息。

推荐相机:Atlas SWIR 和 Triton SWIR IP67 相机。
SWIR 成像将可用波长范围扩展到可见光之外,使系统能够捕捉标准 RGB 相机可能无法获取的水分含量、碰伤和材料特性等信息。
包装:
面向反光包装和可变方向的可靠检测
当产品进入包装环节时,许多挑战已经发生变化。目标物的形状和位置可能更加可控,但包装材料本身往往会带来新的光学问题。塑料薄膜、收缩膜、光面标签、密封托盘和透明表面都可能通过产生眩光或遮挡关键细节来干扰检测。同时,系统还必须在产品方向存在变化的情况下连续运行,并保持速度和重复性。
关键洞察: 在包装自动化中,获得足够对比度以检测缺陷或确定物体方向只是挑战的一部分。相机的时序、同步能力以及与整机系统的集成同样重要。
主要挑战
实时决策
光学不确定性
包装膜检测
在包装膜检测中,所需信号可能已经存在,但塑料薄膜或光面表面的眩光会使其难以提取。由于镜面反射会遮挡检测所需的细节,标准成像方法可能难以应对。


系统使用的相机:Triton 偏振相机和 Phoenix 偏振相机。
偏振成像可以分离镜面反射与漫反射,使系统更容易恢复表面细节,并在反光包装条件下进行检测,同时识别包装膜本身的缺陷。
泡罩包装
在泡罩包装和拾放系统中,任务通常是识别已包装物品,确定其位置和方向,并将坐标发送给机器人或下游工序。即使产品更规则,系统仍然需要处理反光材料、复杂布局,并实现 24/7 连续运行。

系统使用的相机:Triton IP67 相机。
具备同步功能的工业 2D 相机可支持可重复的检测、时序控制和机器人协调。在这些应用中,硬件触发、PTP、时间戳、动作命令和第三方软件兼容性等功能可能与传感器本身同样重要。
仓储与物流:
用于安全物料搬运的实时感知
在仓储与物流环节,挑战不再主要是检测单个产品,而是理解不断变化的运动环境。自动叉车、托盘搬运系统和其他物流平台必须持续感知周围空间,检测物体和结构,并实时做出安全导航或定位决策。
在这一阶段,机器视觉成为更高自主性系统的一部分。仓储与物流汇集了前面流程中出现的许多相同挑战,包括环境变化、反光表面上的有限对比度,以及实时动作需求。但在这里,图像数据服务的是连续感知系统,而不是单次检测事件。
关键洞察: 在自主物流中,目标不仅是采集 3D 数据,而是持续提供足够可靠的空间信息,以支持安全导航和定位。
主要挑战
生物与环境变异性
实时决策
光学不确定性
自动叉车
自动叉车系统必须在动态仓库环境中导航,检测货架位置,估算距离,并在反光工业表面和移动障碍物周围安全运行。即使工作流程是结构化的,环境也很少是静态的。

系统使用的相机:Helios2+ 3D ToF IP67 相机。
LUCID 的 3D 飞行时间相机能够提供机器人引导所需的深度数据,同时 HDR 和工业级 IP67 防护有助于在复杂工况下保持可靠性。
不同应用,共同的成像挑战
从土壤、加工、包装到仓储,食品自动化系统的形态可能非常不同,但相同的核心成像挑战会反复出现。生物与环境变异性、实时决策和光学不确定性会在整个流程中以不同组合出现,这也是为什么相同的相机技术能够支持非常不同的应用。成功的应用不仅取决于传感方式本身。坚固设计、同步、触发、带宽、软件支持和系统集成,往往在可靠部署中发挥同样重要的作用。
目标并不是简单地采集图像,而是提供可靠数据,让更大的系统能够将其转化为实际动作。
传感模态图
生物与环境变异性
户外条件、湿气、运动、不规则几何形状,以及不断变化的目标尺寸、形状和位置。
坚固型 2D / 3D,紧凑型嵌入式方案
当场景物理变化明显且难以控制时,可采用坚固外壳、紧凑外形或深度感知方案。
实时决策
检测结果必须立即驱动机器人、传送带、喷洒设备或自主系统执行动作。
同步、触发、带宽、2D/3D
当图像数据需要立即驱动动作时,相机时序、触发控制和可靠数据流传输就成为核心。
光学不确定性
所需对比度可能被眩光、透明材料、潮湿表面或可见光本身的限制所掩盖。
SWIR、偏振、RGB-D
当信号较弱、被隐藏、具有反光特性,或需要对齐的彩色与深度信息时,应超越标准 RGB 成像。